




03 Feb La electrónica de potencia ampara la movilidad eléctrica
La movilidad es un elemento importantísimo hoy en día. La mayoría de las personas necesitan de un medio de transporte para desplazarse hasta sus puestos de trabajo y nuestra sociedad está basada en el transporte de mercancías desde su punto de producción hasta sus puntos de consumo. Mayoritariamente, la energía usada en el transporte y la movilidad se basa en los hidrocarburos, cuyo elevado coste y efectos dañinos para el entorno nos empuja hacia otro tipo de energías renovables y limpias, lo que se conoce como e-movility.
En este sentido estamos asistiendo a una revolución imparable en la electrificación del vehículo y la generación y uso de energías renovables. Un ejemplo muy gráfico que muestra hacia dónde nos dirigimos es que California, en los Estados Unidos, tiene como objetivo que todos los vehículos que se pongan a la venta en 2050 sean libres de emisiones.
La IEA (International Energy Agency) tiene previsiones que sitúan el número vehículos eléctricos puros e híbridos en 250 millones para 2030. Teniendo en cuenta que en 2018 el número de estos vehículos era de 5.1 millones, se trata de un gran salto que no será posible sin un suficiente avance en los sistemas basados en electrónica de potencia (EP). Se estima que el coste de la EP supone un 30% del coste del vehículo. Desde la producción de la energía eléctrica (EE) hasta el consumo, la EP tiene un papel fundamental en esta revolución.
Qué es la electrónica de potencia
Se conoce como electrónica de potencia a los dispositivos y sistemas basados en semiconductores que se utilizan para la gestión y control de tensiones (V) y corrientes (I) que sobrepasan valores por encima de unos pocos voltios y amperios. Otra forma de clasificar la EP es por la potencia con la que trabaja. Sin mayores complicaciones, podemos decir que la potencia es P = V · I, voltios · amperios, y se mide en vatios (W).
La potencia requerida por la e-movility va desde varias centenas de vatios para mover una bicicleta eléctrica, continúa con unos pocos kilovatios (kW) para las pequeñas motocicletas y crece hasta cientos de kilovatios para los vehículos de varios pasajeros. Se necesitan potencias de hasta 500 kW para autobuses y llegamos al tope en los entornos ferroviarios, en los que se necesitan varios megavatios (MW) en las cabezas tractoras de trenes.
La e-movility supone un desafío para la electrónica de potencia. En cada entorno se necesitan unos componentes específicos y el diseño de estos sistemas requiere de una especialización muy alta. No sólo se necesitan expertos en electrónica, sino además estos expertos deben controlar y entender la interrelación con la envolvente mecánica por los problemas eléctricos y sobre todo térmicos que se generan. Se trata de un entorno muy agresivo y específico.
El uso de EE para el transporte trae ventajas además de las medioambientales ya mencionadas: mejor rendimiento y fiabilidad respecto a los motores de combustión interna.
Sin embargo, existen también inconvenientes:
• Transformación de la energía: la EE está disponible de forma mayoritaria en formato de corriente alterna (CA) y valor de 220 VCA. También se dispone de EE en formato corriente continua (CC) proveniente, por ejemplo, de paneles fotovoltaicos.
Esta EE necesita ser transformada para ser utilizada por los motores eléctricos y todos los componentes auxiliares.
• Almacenamiento: se requieren sistemas de almacenamiento y recarga internos del vehículo para conseguir una determinada autonomía.
Los sistemas basados en EP son la interfaz necesaria para resolver los problemas anteriores de disponibilidad, formatos (CA/CC) y niveles de tensión necesarios.
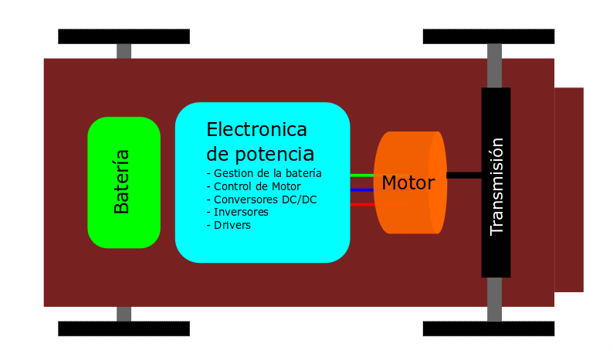
Un vehículo eléctrico consta esencialmente de:
• Batería.
• Motor eléctrico. Convierte la energía eléctrica en energía cinética para la propulsión del vehículo.
• Sistemas basados en EP que gestionan, por ejemplo, la carga y descarga de la batería, convertidores de potencia, inversores, par del motor, velocidad de rotación, etc.
• Unidad de transmisión que transmite la rotación del eje del motor a las ruedas.
Esquemáticamente, se puede ver en la siguiente figura:
Algunos de los subsistemas que necesita un vehículo eléctrico son:
• Inversores. Convierten la corriente continua de una batería en corriente alterna necesaria por los motores.
• Rectificadores. Convierten la tensión de red 220 VCA en CC para almacenar la energía en una batería.
• Convertidores de voltaje. Convierten las tensiones de un voltaje a otro necesario para operar. Por ejemplo, la tensión de una batería de 48 VCC se convierte a 12 o 5 VCC requerido por la electrónica de control (microprocesadores, displays, …).
• Unidades de control. Basados en microprocesadores. Gestionan el flujo de corriente de o desde la batería, activando para ellos los controladores de puerta y midiendo la velocidad del motor, la temperatura, así como otras magnitudes.
Como el lector se puede imaginar, cada bloque es un campo completo de conocimiento que requiere de un estudio detallado.
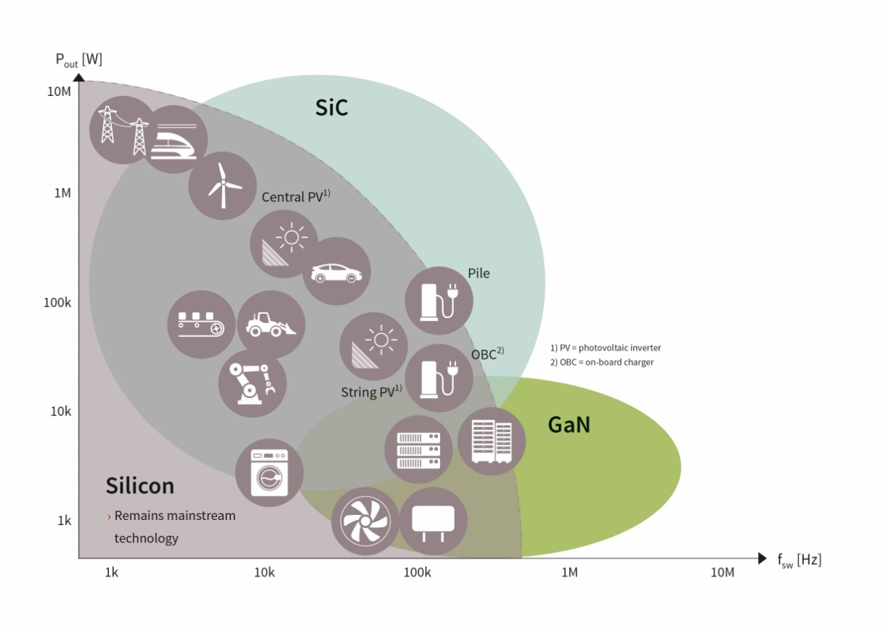
Los componentes más usados en los sistemas de EP son los TRIAC, MOSFET, IGBT, conmutadores, diodos, tiristores, reguladores de voltaje, convertidores, controladores de puerta o inversores. Todos basados en semiconductores como el Si (silicio), SiC (carburo de silicio) y GaN (nitruro de galio). La siguiente imagen muestra las aplicaciones para cada uno de estos semiconductores.
Power electronic 2.0
demás de los componentes activos, no nos podemos olvidar de los componentes pasivos (condensadores, resistencias e inductores) que siguen aumentando sus prestaciones y que siempre acompañan a los componentes activos. En estos nuevos pasivos, los conceptos básicos de funcionamiento se mantienen, pero con la introducción de nuevos materiales dieléctricos y magnéticos, incrementarán sus rendimientos.
Muchas de las prestaciones de nuestros equipos se prueban de forma real en prototipos y preseries antes de lanzar el producto final. Sin embargo, es de esperar que la revolución que nos espera venga acompañada de una nueva gama de herramientas de simulación que nos permita el desarrollo de equipos más complejos, mejores prestaciones y menores costes de desarrollo. Necesitaremos herramientas accesibles y fáciles de usar, entre otras cosas, para predecir el comportamiento de nuestros componentes magnéticos y medir las EMI (Electromagnetic Interference).
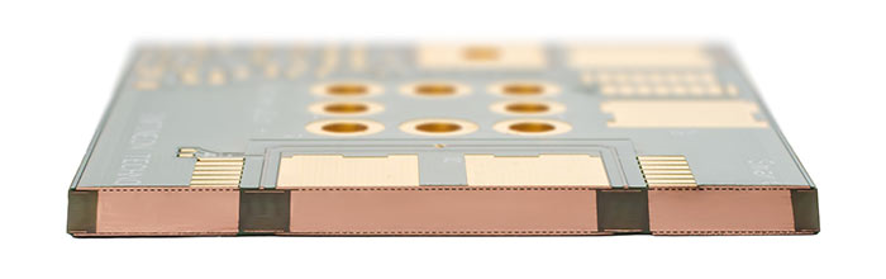
Las tarjetas de circuito impreso que ahora hacen el mero papel (pero no menos importante) de soporte de componentes, incorporarán capas de otros materiales (cerámicos, semiconductores, aluminio…) que permitirán integrar componentes pasivos y activos además de llevar mucha más corriente de la que ahora es posible en el mismo PCB. Un ejemplo de ello se muestra en la Figura 3.
Aparecerán nuevos semiconductores de banda prohibida ultra-ancha (ultra-wide band gap), como los basados en GaO y diamante, y encapsulados que reducirán pérdidas y mejorarán las transferencias térmicas (¡RDSON más baja!).
También es de esperar que aparezcan nuevos algoritmos de control y topologías para convertidores y otros sistemas que introducirán un mejor rendimiento.
La introducción de la potencia inalámbrica, abrirá nuevas posibilidades y aplicaciones, como ya se puede comprobar con la carga inalámbrica de algunos vehículos ligeros.
ELECTRóNICA DE CONTROL PARA VEHÍCULOS ELéCTRICOS DE BAJA POTENciA
Situándonos en el marco de los vehículos de baja potencia, encontramos los patinetes eléctricos, con potencias del orden de 100 W; las bicicletas eléctricas, en el orden del kW; y las motocicletas eléctricas, que utilizan potencias del orden de 10 kW. Estos vehículos suelen emplear baterías por debajo de los 100 V de tensión y sus controladores energizan motores que admiten corrientes de centenas de amperios.
Los motores empleados en este tipo de diseños son mayoritariamente motores síncronos trifásicos sin escobillas de imanes permanentes, debido a su alta eficiencia, superior al 90%; su alta relación potencia/masa y potencia/volumen; sus bajas exigencias de mantenimiento y su capacidad para generar torque.
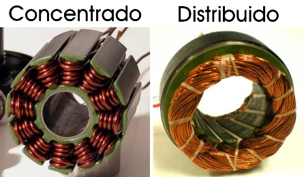
Dentro de este tipo de motores encontramos dos tipos principalmente: los BLDC (Brushless Direct Current) y los PMSM (Permanent-Magnet Synchronous Motor). Ambos poseen imanes permanentes en el rotor y un devanado trifásico en el estátor que permite generar los campos magnéticos que impulsan la rotación. Es en la disposición de este devanado donde encontramos la diferencia fundamental entre ambos diseños. Mientras que los motores BLDC poseen un devanado concentrado en bobinas que se disponen radialmente al eje de giro, los PMSM distribuyen el bobinado a lo largo del estátor (Figura 4). Esta distribución determina los algoritmos de control más propicios para cada tipo de motor, así como el perfil de onda de la fuerza contraelectromotriz que generan al hacerlos girar, lo que permite utilizarlos como generadores que pueden cargar las baterías, reutilizando la energía de frenado en un proceso que se conoce como recarga regenerativa.
Dado que la energía proviene de una batería de tensión y corriente continuas, es necesario que el controlador convierta la potencia continua en potencia trifásica, formando un inversor con unos requerimientos de conmutación adecuados para estos motores.
La siguiente figura muestra un esquema sencillo de un vehículo eléctrico de baja potencia:
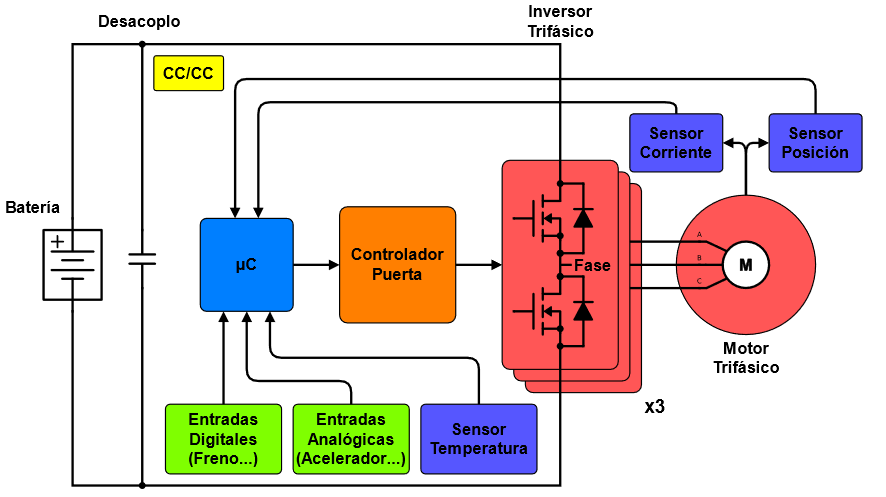
Como se muestra en la Figura 5, el sistema está formado esencialmente por una batería (bus CC) y un conjunto de MOSFET o IGBT para controlar el paso de la corriente por las diferentes fases del motor. Dadas las altas corrientes involucradas y para compensar la carga inductiva del motor, es necesario desacoplar fuertemente el bus CC mediante el uso de condensadores de alta capacidad y baja resistencia en serie. El uso de MOSFET de canal N obliga a la utilización de circuitos de bootstrap para elevar la tensión de las puertas de los transistores superiores por encima de la tensión de las fases.
Por otro lado, son necesarios un conjunto de sensores que proporcionen la realimentación necesaria para implementar los algoritmos de control del motor, ejecutados por el microcontrolador. Entre ellos destacan los sensores de corriente y tensión de las fases, sensores de tensión de la batería y una serie de entradas digitales y analógicas que permiten obtener el estado de elementos como el acelerador o los frenos.
Dado que el rotor tiene imanes permanentes con una polaridad definida, es habitual que los motores integren sensores que codifican la orientación del rotor para facilitar el control. También es importante que el sistema tenga constancia de su estado térmico, por lo que cuenta con sensores de temperatura distribuidos por zonas críticas del sistema, como los MOSFET. La recarga regenerativa es posible gracias al diodo intrínseco de los MOSFET, que permite el paso de corriente hacia la batería.
Bajo estos requerimientos, Cerro Electronic Design ha diseñado un controlador de potencia para motocicletas eléctricas con potencias de varias decenas de kW, baterías con tensiones de hasta 100 V y corrientes de fase de unas pocas centenas de amperios.
Como las tensiones que se manejan no son demasiado elevadas, los MOSFET de silicio disponibles en el mercado son suficientes para soportarlas. Estos transistores cuentan con una resistencia en conducción entre drenador y fuente muy baja y alcanzan altas corrientes continuas de drenador. Para alcanzar los requisitos de corriente del sistema, ha sido necesario paralelizar varios de estos transistores, lo que además reduce el estrés térmico al que están sometidos.
El sistema ha sido diseñado para controlar señales trifásicas conmutando los transistores mediante PWM (Pulse Width Modulation). Los requerimientos de conmutación obligan a implementar controladores de puerta con altas capacidades de corriente que permiten cargar y descargar todas las puertas de los MOSFET en paralelo en los tiempos necesarios.
Para la medición de las corrientes de fase se ha optado por utilizar sensores Hall, que tienen un ancho de banda suficiente, baja impedancia al paso de la corriente y permiten realizar las medidas manteniendo el aislamiento entre la etapa de control y la de potencia. Para garantizar que el controlador o el motor no sufren daños, es importante que estos sensores de corriente tengan tiempos de respuesta rápidos en situaciones de corriente excesiva.
Respecto a los algoritmos de control, el controlador está diseñado para soportar el control trapezoidal, más propicio para los motores BLDC; y el control sinusoidal, apropiado para los motores PMSM. Según la aplicación, se pueden implementar algoritmos de control de torque constante o velocidad constante.
La frecuencia de conmutación juega un papel importante en el sistema. Los transistores funcionan en saturación y es en las conmutaciones cuando tienen lugar las pérdidas. No obstante, reducir demasiado la frecuencia de conmutación puede tener efectos adversos en el ruido acústico generado por el motor.
La PCB ha sido diseñada con grandes espesores de cobre para soportar el transporte de altas corrientes. Además, este cobre también juega un papel importante a la hora de distribuir el calor y evitar que se alcancen temperaturas excesivas en puntos críticos de la placa.
Para una correcta refrigeración, se ha diseñado un disipador de aluminio que está en contacto con los MOSFET y ayuda a sacar el calor hacia el exterior.
conclusiones
Durante el desarrollo de nuestro controlador, hemos sido testigos de la evolución de los componentes que se integran en los dispositivos de EP, de la alta demanda de dichos componentes, que en muchas ocasiones ha afectado a la disponibilidad de los mismo en el mercado, y de los principales retos que tienen que afrontar los diseñadores electrónicos.
Los diseñadores de circuitos integrados se esfuerzan en ofrecer soluciones para los problemas más comunes que tienen que afrontar los diseñadores y los fabricantes de PCB exploran nuevas formas de conseguir placas con mayores capacidades para transportar las altas corrientes y el calor propio de estos sistemas.
La inminente revolución de la movilidad eléctrica irá acompañada de una revolución en la electrónica de potencia, en prestaciones, precio y nuevas aplicaciones. Por todo ello nos espera un futuro brillante a todos los actores que, en mayor o menor medida, hacemos uso de ella.
Autores
Joaquín López Contreras y Manuel Martínez Cebreiros, de la compañía Cerro Electronic Design